Синхронные электродвигатели. работа и применение. особенности
Содержание:
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
В результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
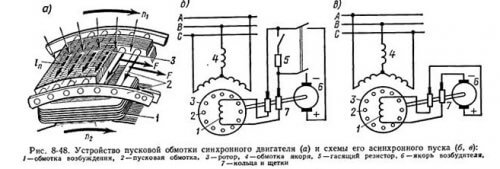
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
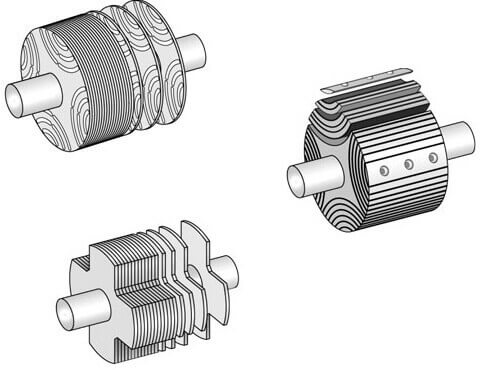
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
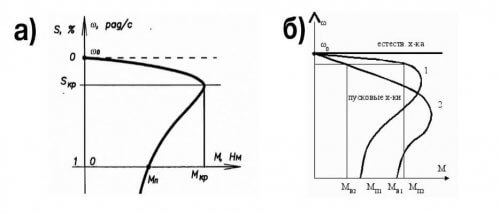
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
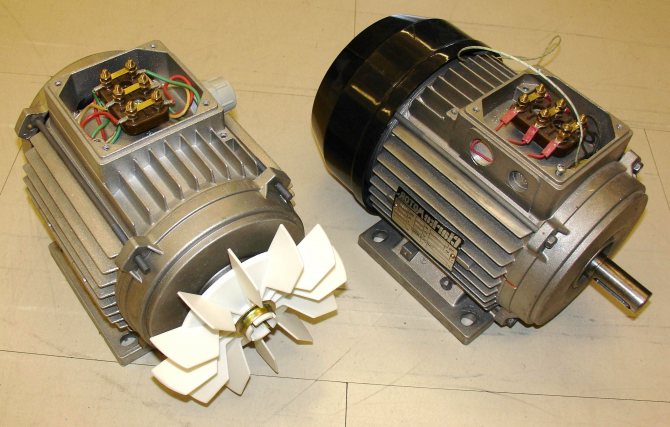
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
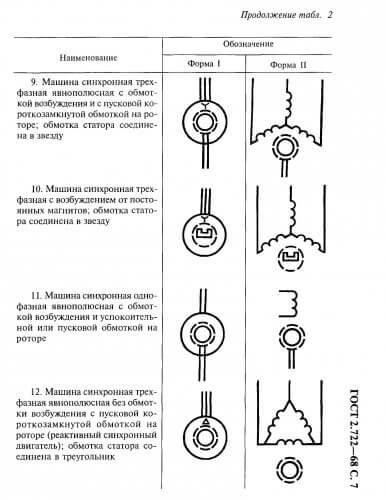
Ниже вы видите условное обозначение на схеме синхронной машины.
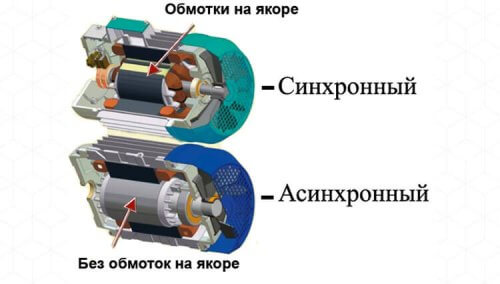
Синхронный и асинхронный двигатель отличия
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий магнитное поле статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. Трехфазные асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
electric-220.ru
Схема и альтернат функционирования СГ
Принцип работы гена следующий: ротор вращается от источника энергии, в роли которого может выступать автодвигатель, электромотор или турбина. Ротор – это один из основных элементов СГ, который еще называют индуктором. Обмотка возбуждения находится внутри него.
Кроме индуктора, важным элементом СГ является статор. Он представляет собой неподвижную часть.
Помимо ротора и статора в состав гена входит еще много дополнительных элементов, таких как обмотки, выпрямитель, катушка и т.д.
Функционирование синхронного генератора
Примечательно, что СГ может функционировать в двух режимах: как источник питания, и как двигатель. Все зависит от силы прибора.
Различают графики работы СГ: график работы в качестве гена и схемограмма функционирования в роли двигателя. СГ принимает механическую энергию, а выпускает электрическую, в первом случае. Во втором – наоборот, принимает электрическую, выпускает механическую.
В качестве гена переменного тока прибор используется в автомобилях, на электростанциях, а в качестве мотора – когда нужен двигатель, функционирующий с ПКЧ (регулярным вращением).
По сути, всю работу СГ можно представить, как функционирование электромагнитной индукции. Когда задействован режим ХХ, якорная катушка внутри прибора разомкнута. Магнитполе агрегата формируется в данном случае только обмоткой индуктора. Когда же задействовано вращение, в приборе присутствует постоянная частота и магнитполе передвигается посредством шунта статорной обмотки. Иными словами, в гене появляется ЭДС (скалярная величина).
Графики работы гена синхронного
Обмотка возбуждения в СГ – это важный элемент, создающий в гене первоначальное магнитполе для задействования катушки якоря.
Отличительным свойством СГ физики называют жесткую связь между частотой переменной ЭДС и частотой вращения индуктора. Все это выражается такой вот формулой.
Формула 1
Число пи в данной формуле, это количество полюсов обмотки индуктора и статора.
Функциональная схема СГ представлена на фото ниже.
Функциональная схема СГ
3-фазная электрообмотка, которая находится на статоре, ничем не разнится от обмотки того же типа АГ. Магнит с электрообмоткой нашел место на индукторе (на фото отмечен цифрой 2). Питание он получает посредством подачи неизменного напряжения через контактно-щеточный узел.
На схеме ПД отмечен двигатель, его вал. В качестве него, как и говорилось выше, может быть использован не только автомотор, но и турбина либо иной источник механической энергии
Индуктор СГ задействуется с синхронной скоростью, что очень важно, и в буквальном смысле, определяет характерные черты этого вида гена
Магнитполе индуктора тоже вращается с синхронной амплитудой, тем самым, индуцируя симметричную 3-фазную систему ЭДС.
С1, С2 и С3 на схеме – это клеммозажимы статорной обмотки. Именно через них с подключением нагрузки в фазах появляются токи, энергия, создающая вращающееся магнитполе. Амплитуда вращения этого поля идентична частоте вращения индуктора. Получается, что в СГ магнитполя статора и индуктора совершают обороты с равной скоростью – синхронно.
Тут пришло время представить другую формулу.
Формула 2
Она показывает, что при неизменной амплитуде вращения ротора, обозначенного латинской n, схемограмма ЭДС статорной обмотки будет непременно определяться, как закономерность рассредотачивания магнитиндукции.
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
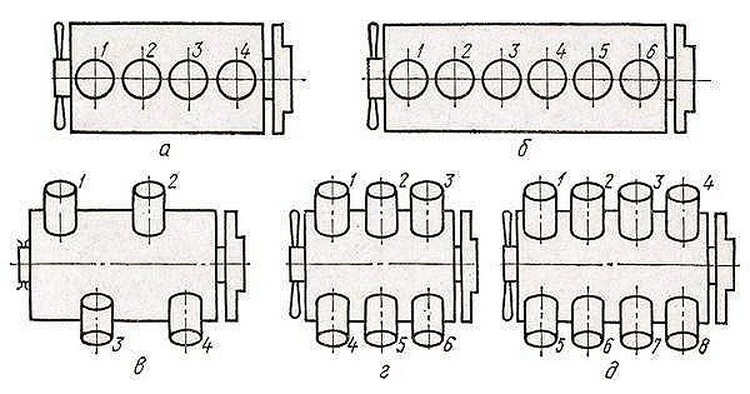
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
Варианты устройства синхронных двигателей
Разновидности роторов
Принцип работы ротора
Один из вариантов конструкции двигателя
Ротор с постоянными магнитами
Гистерезисный движок
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
Классический движок с индуктором
Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть
Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.
Движки-компенсаторы на подстанции
Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Типы синхронных электродвигателей
Cинхронный электродвигатель с обмоткой возбуждения
Синхронный электродвигатель с обмоткой возбуждения имеет явнополюсный ротор с электромагнитным возбуждением. Для создания постоянного магнитного поля ротора требуется источник постоянного тока. Обмотки ротора двигателя соединены с контактными кольцами к которым через щетки подводится постоянный ток. Преимуществом данных двигателей является отсутствие дорогостоящих магнитов, недостатком — наличие щеток и необходимость питания обмоток ротора.
Cинхронный электродвигатель с постоянными магнитами
Данный двигатель имеет ротор с постоянными магнитами. В отличии от коллекторного двигателя постоянного тока функции коллектора и щеток выполняют полупроводниковые ключи. Имеет такие же преимущества, что и коллекторный двигатель постоянного тока, при этом не требует текущего ремонта (бесщеточный) в процессе эксплуатации. Такой электродвигатель требует сложной системы управления. Бесщеточные синхронные электродвигатели с постоянными магнитами обладают рядом преимуществ над другими двигателями, обладая лучшими показателями: мощность/объем, КПД, момент/инерция и др.
Синхронный реактивный электродвигатель
Синхронный электрический двигатель с ротором из ферромагнитного материала. Принцип действия синхронного реактивного электродвигателя основан на свойствах ферромагнитных тел ориентироваться так, чтобы сцепленный с ним магнитный поток оказался максимальным. Основным преимуществом электродвигателя является: простота и низкая цена изготовления. При одинаковых размерах, реактивный электродвигатель развивает больший момент, чем асинхронный, но имеет более низкий коэффициент мощности. Данный электродвигатель для работы требует систему управления.
Гистерезисный электродвигатель
Синхронный электродвигатель с неявнополюсным гистерезисным ротором. Вращающий момент этого электродвигателя создается за счет магнитного гистерезиса материала ротора. Достоинствами гистерезисных двигателей являются простота устройства, надежность в эксплуатации, отсутствие пусковых приспособлений, плавность втягивания в синхронизм, практически неизменный ток при пуске и работе. К недостаткам можно отнести относительно высокую стоимость материала ротора.
Шаговый электродвигатель
Синхронный бесщеточный электродвигатель, который без устройств обратной связи преобразует сигнал управления в угловое перемещение ротора с фиксацией его в заданном положении. Главное преимущество шаговых электродвигателей — точность, а также возможность осуществлять позиционирование и регулировать скорость без датчика обратной связи.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.
До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).
Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .
В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянного
тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда
энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий
трансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).
В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
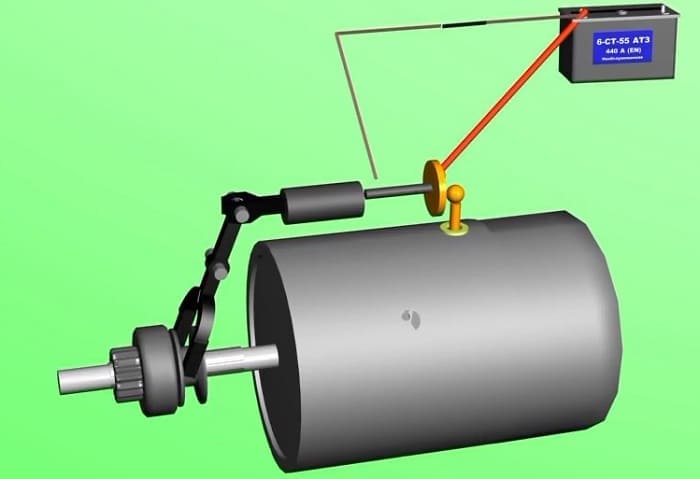
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник